What is an Industrial Robot Gripper?
An industrial robot gripper, often referred to as an end effector, is a device attached to the end of a robotic arm designed to grasp and manipulate objects. These grippers mimic human hand functions but are engineered to handle a variety of shapes, sizes, and materials in industrial environments.
Key functions of industrial robot grippers include:
Picking and placing parts or products
Assembly and machine tending
Inspection and quality control
Material handling and packaging
Types of Industrial Robot Grippers
Understanding the different types of robot grippers is essential to choosing the right tool for your application. Here are the most common types:
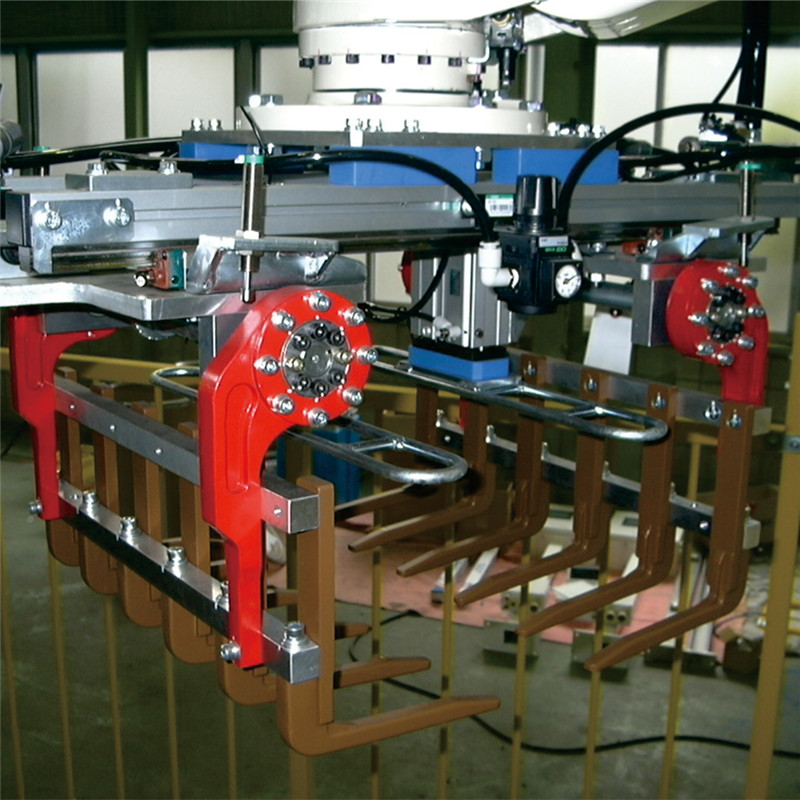
Pneumatic Grippers
Operate using compressed air to open and close the jaws or fingers. Ideal for fast, repetitive tasks requiring moderate gripping force.
Electric Grippers
Use electric motors for precise control of gripping force and finger position. Suitable for delicate tasks and applications requiring variable force.
Hydraulic Grippers
Powered by hydraulic fluid, these grippers provide high gripping force for heavy-duty applications but are less common in lightweight automation.
Vacuum Grippers
Employ suction to lift and hold objects, especially useful for flat or smooth surfaces like glass or sheet metal.
Adaptive or Flexible Grippers
Designed to conform to the shape of the object, often with multiple fingers or flexible fingertips, enabling versatile handling of varied parts.